2013年4月29日月曜日
OMRON MEMS非接触温度センサD6T
さて、GW前半最終日の今日のがらくたは、スイッチサイエンスさんで入手してあった、OMRON製のMEMS非接触温度センサ D6Tです。非接触で温度を測定できるセンサですが、簡単に言ってしまえば、超低解像度のサーモグラフィーです。スイッチサイエンスさんのサイトにProcesisngと合わせた使い方がサンプル付きで載っていたので、そのサンプルを流用させてもらいつつ、Arduinoのプログラム部分に先日のDRV8830 I2Cモータドライバでモータを動かす処理をくっつけてみることにしました。

前回の台車の先っちょに非接触温度センサを取り付けます。

この15mm×25mm角くらいのレンズの付いたのが、MEMS非接触温度センサD6Tです。

いくら試作・実験とはいっても、我ながらいい加減過ぎです。セロテープで貼っただけです・・・。
で、このD6Tは4×4の分解能で温度を取得できるので、4×4の温度の高い方向(今回は左右のみ)を算出して、台車の方向転換を行います。
「靴のムカデ屋の主人のカップ」のようにぃぃっ、追いかけてくるぞっ、こいつっっぅ。てな、わけで、
とりあえず、熱源の方向を追跡できてるみたい。今後、熱源を追尾して走らせるようなことができるといいんだけど。

前回の台車の先っちょに非接触温度センサを取り付けます。

この15mm×25mm角くらいのレンズの付いたのが、MEMS非接触温度センサD6Tです。

いくら試作・実験とはいっても、我ながらいい加減過ぎです。セロテープで貼っただけです・・・。
で、このD6Tは4×4の分解能で温度を取得できるので、4×4の温度の高い方向(今回は左右のみ)を算出して、台車の方向転換を行います。
「靴のムカデ屋の主人のカップ」のようにぃぃっ、追いかけてくるぞっ、こいつっっぅ。てな、わけで、
とりあえず、熱源の方向を追跡できてるみたい。今後、熱源を追尾して走らせるようなことができるといいんだけど。
2013年4月28日日曜日
スイッチサイエンス R1350Nジャイロシールド
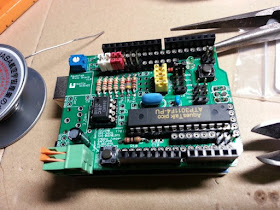
今回のがらくたは、スイッチサイエンスさんのR1350Nジャイロシールドです。3.3V UART接続のR1350NジャイロモジュールをUART-I2C/SPI変換モジュールと合わせて実装して、ArduinoのシールドとしてI2Cで利用可能にしてあり、ライブラリもスイッチさんからダウンロードできます。

このR1350Nジャイロモジュールは秋月等のジャイロセンサと比べると随分と割高ですが、特長として、なんといっても、「角度」がそのまま取り出せるというのがあります。普通のジャイロセンサは「角速度」を出力するので、自分で積分してやらないといけないのですが、どうしても、ノイズやオフセット、ドリフトの扱いが厄介になります。その点、このR1350Nは「自己完結キャリブレーションで簡単に角度が取り出せます」って、説明に書いてあるので、もしかすると、そのあたりを気にしないで使えるんじゃないかという期待大です。
このR1350Nジャイロシールドを前回のI2Cモータドライバを試した台車に載せてみます。Arduinoにスタックして、

モータドライバにも配線しました。

ジャイロの値で、約90°左右に方向転換させてみました。静止する際に台形制御や段階的にスピードを落としたりをしていないので、オーバーランしますが、角度をとれているようです。
とりあえず、動かしてみたというところで、実はカタログスペックもろくに見ていないんですが、都度リセットをかけながら、上記動画くらいのスピードで方向転換させる際の角度検出には使えそうです。

このR1350Nジャイロモジュールは秋月等のジャイロセンサと比べると随分と割高ですが、特長として、なんといっても、「角度」がそのまま取り出せるというのがあります。普通のジャイロセンサは「角速度」を出力するので、自分で積分してやらないといけないのですが、どうしても、ノイズやオフセット、ドリフトの扱いが厄介になります。その点、このR1350Nは「自己完結キャリブレーションで簡単に角度が取り出せます」って、説明に書いてあるので、もしかすると、そのあたりを気にしないで使えるんじゃないかという期待大です。
このR1350Nジャイロシールドを前回のI2Cモータドライバを試した台車に載せてみます。Arduinoにスタックして、

モータドライバにも配線しました。

ジャイロの値で、約90°左右に方向転換させてみました。静止する際に台形制御や段階的にスピードを落としたりをしていないので、オーバーランしますが、角度をとれているようです。
とりあえず、動かしてみたというところで、実はカタログスペックもろくに見ていないんですが、都度リセットをかけながら、上記動画くらいのスピードで方向転換させる際の角度検出には使えそうです。
2013年4月27日土曜日
ストリナのI2Cモータドライバ(DRV8830)
GWですね~。別に出かける予定もないんですが、幸い、カレンダー通りに休めそうなので、(間の出勤日とかGW明けは仕事になるかな・・・)、色々と入手してあったまま手付かずになったがらくたやおもちゃで遊びたいと思っています。
手始めに、ストリナのI2Cモータドライバです。DRV8830というドライバICを搭載して、小型の模型用モータ程度のものを制御するためのものです。秋月でも同様のDRV8830のドライバが出ているようです。一応スペックとしてはMAX1Aまで駆動できるとなっていますが、ストリナさんのサイトにも注意書きがありますが、1AはMAXピーク値で元々はプリンタの紙送り用モータなどに使うものではないかという感じです。なので、定常的に流せるのは200mAとかそんなもんでしょうか。車輪ロボットのモータ制御にはちょっと厳しいかもしれませんが、そこは「消耗品」と割りきって、自己責任で使ってみたいと思います。

端子ブロック(2極)あるいは2.54ピッチ5ピンコネクタ分くらいの幅の小型の基板です。んー、ロボットに載せようとした時にはどうやって固定しよう?とりあえず今回はそのままぶら下げておきます。

さくっと試すのに、Arduinoでいってみようと思います。簡単なライブラリ(試作版)を作成して、動かしてみました。
手始めに、ストリナのI2Cモータドライバです。DRV8830というドライバICを搭載して、小型の模型用モータ程度のものを制御するためのものです。秋月でも同様のDRV8830のドライバが出ているようです。一応スペックとしてはMAX1Aまで駆動できるとなっていますが、ストリナさんのサイトにも注意書きがありますが、1AはMAXピーク値で元々はプリンタの紙送り用モータなどに使うものではないかという感じです。なので、定常的に流せるのは200mAとかそんなもんでしょうか。車輪ロボットのモータ制御にはちょっと厳しいかもしれませんが、そこは「消耗品」と割りきって、自己責任で使ってみたいと思います。

端子ブロック(2極)あるいは2.54ピッチ5ピンコネクタ分くらいの幅の小型の基板です。んー、ロボットに載せようとした時にはどうやって固定しよう?とりあえず今回はそのままぶら下げておきます。

さくっと試すのに、Arduinoでいってみようと思います。簡単なライブラリ(試作版)を作成して、動かしてみました。
2013年4月23日火曜日
大人の科学 パタパタ電波時計
アマゾンでしばらく前に見つけて、思わず「ワンクリックで予約」しておいて、すっかり忘れていた「大人の科学 パタパタ電波時計」が届いたので、早速組み立ててみました。

パッケージから取り出して、左が冊子、右が部品の入っている発泡スチロールの箱です。部品のスチロール箱の裏側にはパタパタの文字板が入っています。

組み立てるだけだと口が寂しいので、今日は寒さが戻ったこともあり、焼酎お湯割りも用意。

いも焼酎の原酒をお湯割りにして、先日のサンクトガーレンの頒布会でもらったおまけの湘南ゴールドの皮を入れて香りを楽しみます。

パッケージから部品を取り出して、作業台の上に広げてみました。結構な数があります。

組み立て説明書の通りに進めていきます。裏蓋に回路を固定します。使っているマイコンなどはわかりませんでした。基板にモールドされています。

電池の金具をさして

モータのコネクタをさして・・・、当たり前?ですが、ハンダ付けとかはありません。プラモデルとかブロックの間隔で組み立てられます。さすが、学研の科学の付録。

骨組みができてきました。

ディアゴもそうだけど、ドライバだけで組み立てられるって結構すごいことじゃないかと思います。キットを考えて、開発・現物化する人たちはすごいですね。

上蓋の取り付け。やっぱり、外装は透明じゃないとだめですよね。中の動きが見えないと。

枠まで、できた状態。

パタパタ機構の要となる軸とギア部。

左右を間違えないようにはめ込みます。

左右それぞれにマイクロスイッチがついていて、ギアのカム状の部分を検出して、回転の開始位置(基準位置)を検出しているようです。
側面、外板を取り付け。

背面、外板も付けて、ほぼ完成。

あとは、ひたすら、パタパタのパネルをつけていきます。これがしんどい・・・。

パネルの取付を終えて、じゃあ、ってことで、試験運転。
あらら、パネルが外れちゃった。再度、取り付け直して、動作することを確認しました。ただ、時間がうまく合わない・・・。電波をうまく拾ってこれないのか?もしかして、取り付け位置をずらしてつけてしまった?後者はやだな・・・。付け直しはかんべんしてほしいな。窓際においてしばらく様子を見てみよう。
→ 追記。窓際に半日くらい置いておいたら、時間が正しく校正されました。なので、実際に使っています。ただ、ギアとパタパタ音がかなり大きいです。

パッケージから取り出して、左が冊子、右が部品の入っている発泡スチロールの箱です。部品のスチロール箱の裏側にはパタパタの文字板が入っています。

組み立てるだけだと口が寂しいので、今日は寒さが戻ったこともあり、焼酎お湯割りも用意。

いも焼酎の原酒をお湯割りにして、先日のサンクトガーレンの頒布会でもらったおまけの湘南ゴールドの皮を入れて香りを楽しみます。

パッケージから部品を取り出して、作業台の上に広げてみました。結構な数があります。

組み立て説明書の通りに進めていきます。裏蓋に回路を固定します。使っているマイコンなどはわかりませんでした。基板にモールドされています。

電池の金具をさして

モータのコネクタをさして・・・、当たり前?ですが、ハンダ付けとかはありません。プラモデルとかブロックの間隔で組み立てられます。さすが、学研の科学の付録。

骨組みができてきました。

ディアゴもそうだけど、ドライバだけで組み立てられるって結構すごいことじゃないかと思います。キットを考えて、開発・現物化する人たちはすごいですね。

上蓋の取り付け。やっぱり、外装は透明じゃないとだめですよね。中の動きが見えないと。

枠まで、できた状態。

パタパタ機構の要となる軸とギア部。

左右を間違えないようにはめ込みます。

左右それぞれにマイクロスイッチがついていて、ギアのカム状の部分を検出して、回転の開始位置(基準位置)を検出しているようです。
側面、外板を取り付け。

背面、外板も付けて、ほぼ完成。

あとは、ひたすら、パタパタのパネルをつけていきます。これがしんどい・・・。

あらら、パネルが外れちゃった。再度、取り付け直して、動作することを確認しました。ただ、時間がうまく合わない・・・。電波をうまく拾ってこれないのか?もしかして、取り付け位置をずらしてつけてしまった?後者はやだな・・・。付け直しはかんべんしてほしいな。窓際においてしばらく様子を見てみよう。
→ 追記。窓際に半日くらい置いておいたら、時間が正しく校正されました。なので、実際に使っています。ただ、ギアとパタパタ音がかなり大きいです。
2013年4月13日土曜日
AquesTalk Pico を試してみました。
以前に一度いじったことはあったんですが、AquestさんのAquesTalk Pico をシールド化する基板がスイッチサイエンスさんで売っていたので、とりあえず、手持ちの部品を載せて動かしてみました。コンデンサの在庫があまりなくて、発信防止用やフィルタ部分のコンデンサを省略してありますが、とりあえずお試しで音をだすことは出来ました。
スイッチサイエンスさんから購入したAquesTalk Picoシールド化基板です。

とりあえず、手持ちであった部品だけ載せてみて
AquestTalk Pico LSIをArduinoでI2C経由で使うためのライブラリをAQUESTさんが用意してくれていますので、Arduinoであれば簡単に音声合成が試せます。
トーキングワウ(古っ!)とかボコーダとか、若かりし頃を思い出します・・・。ドモアリガトミスターロボット・・・
スイッチサイエンスさんから購入したAquesTalk Picoシールド化基板です。

とりあえず、手持ちであった部品だけ載せてみて

AquestTalk Pico LSIをArduinoでI2C経由で使うためのライブラリをAQUESTさんが用意してくれていますので、Arduinoであれば簡単に音声合成が試せます。
フィルタのコンデンサが在庫切れで実装してないのでノイズが多いですが、そのうち、なにかのついでに秋月あたりでコンデンサを調達して、追加してみたいと思います。
トーキングワウ(古っ!)とかボコーダとか、若かりし頃を思い出します・・・。ドモアリガトミスターロボット・・・
2013年4月8日月曜日
ロビ 14号まで組立て
ロビを14号まで組み立てました。12号、13号で溜まっていた右肩部分の組立になります。ただ単に組み立てただけの報告なので、あまりおもしろくないですが、ロビは結構人気があるみたいなので、もしかしたら、多少は誰か見て、ふ~ん、と思ってもらええれば、って感じです。

とりあえず、14号を開梱。

今号のパーツです。右肩のところですね。

12号のケーブルと13号のサーボと合わせて

組立の途中経過は、ご自分で作られる方のためのお楽しみということで、端折って、

こんなかんじで組みあがります。

やっぱり、高橋さんのロボットは他の二足と違って、デザインが、らしいというか、いいですね。(まあ、バトル用だと耐久性とかもあるんで)他の二足ロボットはサーボを主骨格にして、金属の板でサーボをつなぎ合わせていくような構造が多いですが、ロビはプラスチック成形のボディパーツにサーボはあくまでアクチュエータとして埋め込まれている(もちろん、骨組みと一体化して使われている部分もあります)っていう感じを受けます。次号以降を楽しみに待ちましょう。

とりあえず、14号を開梱。

今号のパーツです。右肩のところですね。

12号のケーブルと13号のサーボと合わせて

組立の途中経過は、ご自分で作られる方のためのお楽しみということで、端折って、

こんなかんじで組みあがります。

やっぱり、高橋さんのロボットは他の二足と違って、デザインが、らしいというか、いいですね。(まあ、バトル用だと耐久性とかもあるんで)他の二足ロボットはサーボを主骨格にして、金属の板でサーボをつなぎ合わせていくような構造が多いですが、ロビはプラスチック成形のボディパーツにサーボはあくまでアクチュエータとして埋め込まれている(もちろん、骨組みと一体化して使われている部分もあります)っていう感じを受けます。次号以降を楽しみに待ちましょう。
2013年4月7日日曜日
KONDOの多脚ロボットKMRにPSDセンサを付けてみました。
近藤科学のページにKMR-P6多脚ロボットでオプションの距離センサをADで取り込む方法が紹介されていたので、試して見ることにしました。専用オプションの距離センサを買わずに、手持ちのPSDセンサ、コネクタ、線材の在庫で組み立てます。近藤科学の純正オプションとPSDセンサはおそらく同じものだと思います。

センサ側のコネクタが小さくて、圧着が面倒です。ロボットのボード側は3ピンのサーボに使っているコネクタで圧着して、ボードのAD1端子に接続しました。
センサを多脚ロボットの頭部(パン・チルト用のサーボを追加しています)に取り付けます。

PSDセンサの裏側にタミヤの工作キットのユニバーサルボードの切れ端をネジ止めして平らにして、あとは、お得意のマジックテープでサーボに貼り付けています。ちょっとグラグラするけど、付け外しができるので、常套手段です。

なかなか素敵な外観です。二足もいいですが、やっぱり、多脚ロボットは萌えます。
試しに近藤科学のページに載っていた内容をほぼそのままですが、とりあえず、動かしてみました。PSDセンサの値をロボット側のマイコンボードのADで取得していますが、その値を一旦BluetoothでPCに送信して、PC側で距離に直して、判断、プリセット動作の前進や旋回の指示をロボット側へ送っています。

センサ側のコネクタが小さくて、圧着が面倒です。ロボットのボード側は3ピンのサーボに使っているコネクタで圧着して、ボードのAD1端子に接続しました。
センサを多脚ロボットの頭部(パン・チルト用のサーボを追加しています)に取り付けます。

PSDセンサの裏側にタミヤの工作キットのユニバーサルボードの切れ端をネジ止めして平らにして、あとは、お得意のマジックテープでサーボに貼り付けています。ちょっとグラグラするけど、付け外しができるので、常套手段です。

なかなか素敵な外観です。二足もいいですが、やっぱり、多脚ロボットは萌えます。
試しに近藤科学のページに載っていた内容をほぼそのままですが、とりあえず、動かしてみました。PSDセンサの値をロボット側のマイコンボードのADで取得していますが、その値を一旦BluetoothでPCに送信して、PC側で距離に直して、判断、プリセット動作の前進や旋回の指示をロボット側へ送っています。